Rpanion-Server 0.11.0 has been released, primarily as a bugfix update, with support for the latest Raspberry Pi and NVIDIA Jetson models.
Rpanion-Server is an Open-Source software package designed to facilitate the management of companion computers (such as a Raspberry Pi or NVIDIA Jetson) on an ArduPilot-powered vehicle. It provides functions like MAVLink telemetry distribution, video streaming and network management, NTRIP streaming, flight log management, and automatic flight log cloud uploads.
This release includes the following major changes:
Added support for Raspberry Pi 5 and NVIDIA Jetson Orin
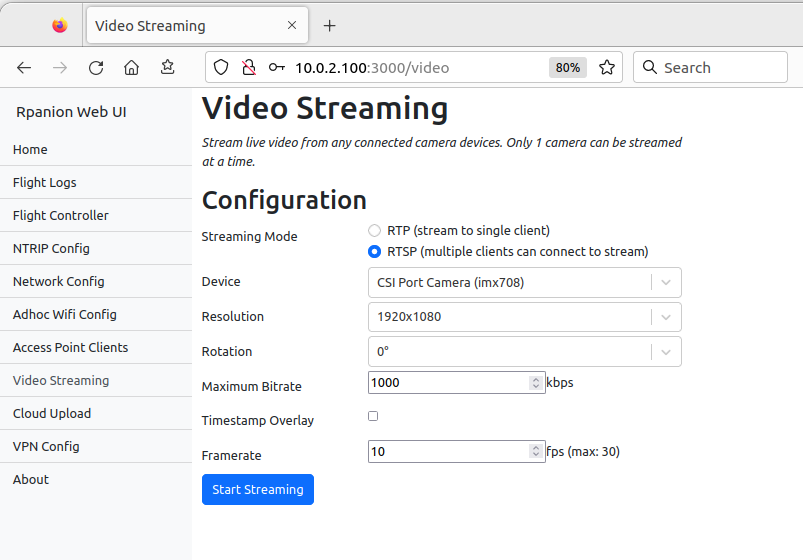
Reduced latency in video streams
Basic implementation of the MAVLink camera protocol
Added username/password protection to the Web GUI
Various bug fixes to the camera and networking pages
Comprehensive documentation and pre-built disk images for the Raspberry Pi are available here.
The source code for Rpanion-Server is available on GitHub, where bug reports and Pull Requests are welcome.
We’re thrilled to announce that the Pi-Connect Lite is now available at RobotShop. This makes it easier than ever for international customers to get their hands on this versatile device. Customers in the US, UK, and Europe can now enjoy lower prices. You also gain from quicker shipping options. This allows for a more seamless shopping experience.
Don’t wait—order your Pi-Connect Lite today and have it delivered straight to your door in record time!
We are happy to announce the open-sourcing of the design files for the Pi-Connect Lite (V1.x series), bringing a proven power supply and telemetry (UART) interface into the public space. Whether it be for study or manufacturing your own boards, the Pi-Connect Lite design files will assist in accelerating your own projects.
We are excited to announce the release of Version 2 of the Pi-Connect Lite board! This board represents a major re-design, based on customer feedback and supporting additional use-cases when interfacing a Raspberry Pi to an Ardupilot (or PX4) based flight controller.
There are three major changes to this board:
The power connector is an XT30, which are cheap and commonly available.
There are 2x JST-GH telemetry ports for then dual telemetry is needed. Note, this is only supported on the Pi4 and Pi5.
The power switch has been replaced with a power button. Use a short-push to turn the Pi on or off, and a long-push to immediately cut power.
The more under-the-hood changes include a complete re-design of the power supply, allowing for lower EMI.
The dual telemetry ports, in particular, enable more advanced use cases. By having MAVLink telemetry on one port for command and control of the vehicle, the 2nd port can be used for gimbal control, ROS2 DDS or any other custom UART-based sensor.
Rpanion-Server 0.10.0 has been released. This is primarily a bugfix update, with some important camera streaming updates.
Rpanion-Server is an Open-Source software package for easily managing your companion computer (such as a Raspberry Pi or NVIDIA Jetson) on a ArduPilot-powered vehicle. It provides such functions as MAVLink telemetry distribution, video streaming and network management, NTRIP streaming and flight log management.
This release includes the following major changes:
Migrate to libcamera API on the Raspberry Pi
Added support for the 2nd CSI port on Raspberry Pi
Hardware x264 encoding for USB cameras
Reduced x264 latency
Support for CSI camera streaming on the NVIDIA Jetson
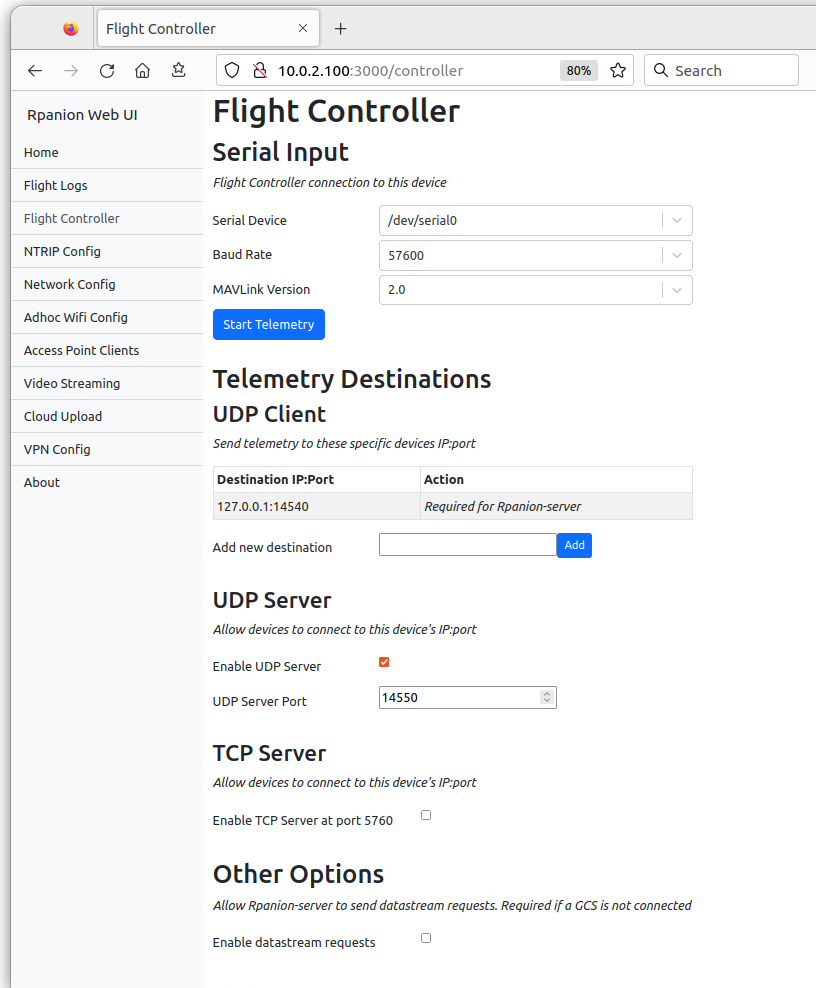
Option to send datastream requests to flight controller
As an experiment in autonomous navigation with Ardupilot, I built a rover capable of autonomous path following.
It uses the ML/AI technique of semantic segmentation to determine where the desired path is, on a live video feed. Using this on a Jetson Nano, a relative bearing is generated to stay on the path. This bearing is sent to Ardupilot, which (in GUIDED mode) turns the rover to that bearing.
It’s a good example of using Companion Computer to do the vision processing and high-level planning, leaving Ardupilot with the lower level vehicle control
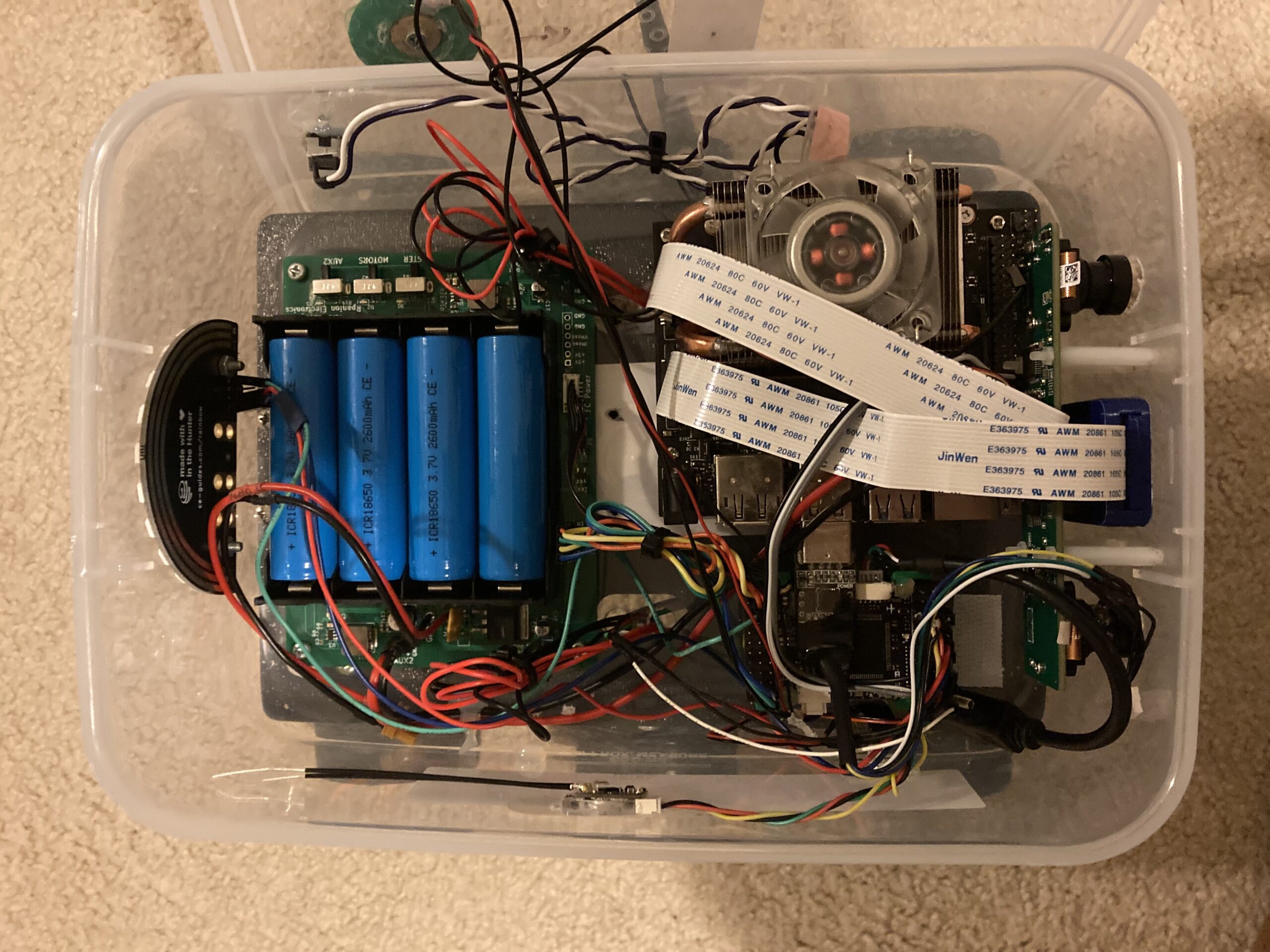
mRO X2.1-777 flight controller (any controller will generally work)
Ublox M8N GPS
The flight controller and Jetson were connected via UART, for MAVLink telemetry.
The layout is shown below:
Note: A stereo camera was not fitted, but not used.
Software layout
All processing was done in realtime on the Jetson, which would sent out MAVLink messages (with desired speed and heading) to ArduPilot.
When ArduPilot was in GUIDED mode, it would move the rover as per the MAVLink messages.
The Rpanion-server software was used to manage telemetry streams, with the custom “segmav” software to process the video stream and output a desired heading and speed. Note the speed was hard-set at 0.5 m/s.
Segmav software
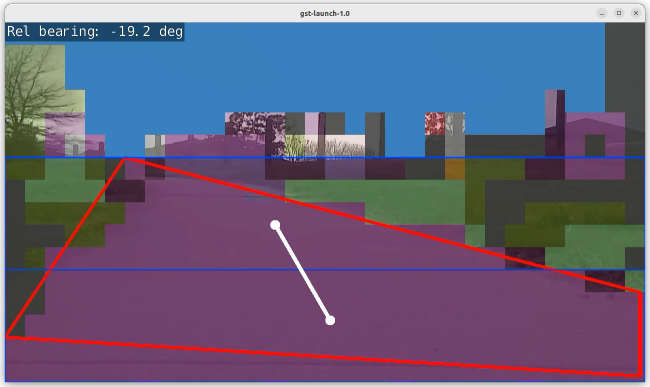
The segmav software is designed to use Semantic Segmentation to determine the correct heading for a rover to stay on a road or path.
Segmav uses the following steps during processing:
Semantic segmentation is first used to separate the captured image into category areas: “Sky, Grass, Road, …”.
The largest area (contour) with a “road” category (purple) is then found (red polygon).
This contour is then split into two – halfway in the horizontal plane (blue boxes).
The centroid of each half is calculated (white points).
A line is drawn between the two points and the angle calculated (white line).
The angle is put through a 3 point moving average to smooth out any large changes.
This angle (yaw) is encoded into a MAVLink message SET_POSITION_TARGET_LOCAL_NED, in Body (relative) frame and the forward velocity and yaw components. The velocity component is hard-set to 0.5m/s.
I could get 7fps using the fcn-resnet18-cityscapes-1024x512 dataset, with less than 300ms latency. This gave a low enough latency at speeds of 0.5m/s. For higher vehicle speeds, a faster Jetson (or smaller dataset) would be required.
A video demonstration is available below:
Issues
The accuracy was not great. The rover would occasionally dive off the path, due to an incorrect segmentation. A better tuned or larger dataset would likely reduce this from occurring.
The Runt Rover frame itself wasn’t good over grassy terrain. It would frequently get bogged when running over long grass.
Conclusions
This project is a good proof-of-concept for using semantic segmentation based navigation for following paths or tracks. Better datasets and a more powerful Jetson could
Version 0.9.0 of Rpanion-server has been released!
Rpanion-Server is an Open-Source software package for a managing the companion computer (such as the Raspberry Pi) connected to an ArduPilot-based flight controller.
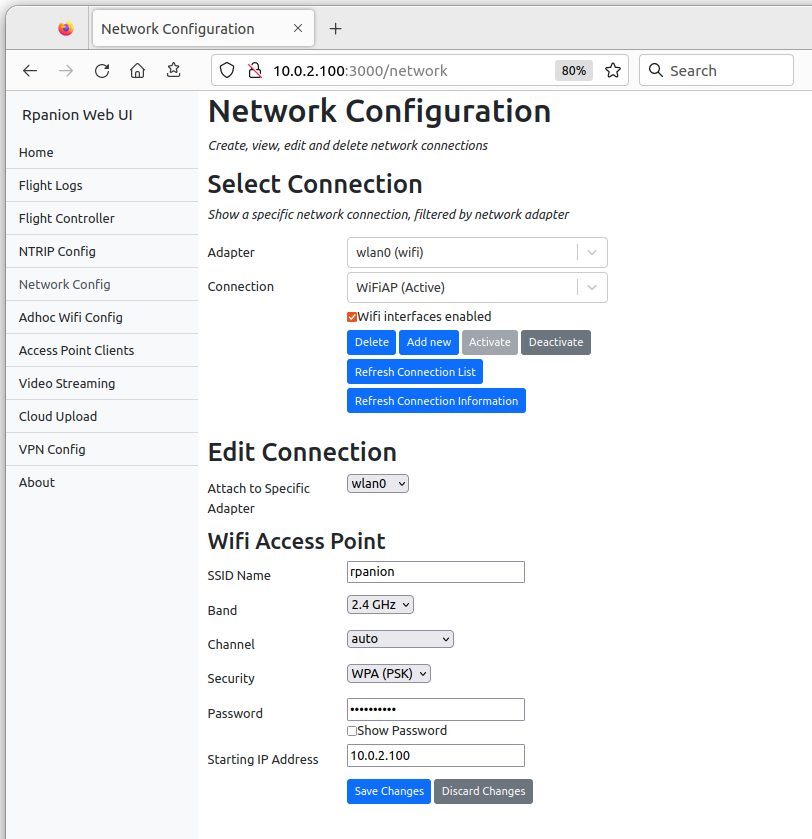
Rpanion-Server consists of a node.js-based webserver for the user interface and mavlink-router for routing MAVLink telemetry from a connected flight controller. There are also modules for managing network connections, NTRIP streaming, flight log management, video streaming and viewing hardware information.
Version 0.9.0 adds the following major new features:
Automated uploading of flight logs
VPN support (Zerotier and Wireguard)
Automated generation of KMZ files from flight logs
Timestamp overlay for video streams
Various bugfixes and ease-of-use changes to the GUI
The documentation and pre-built disk images for the Raspberry Pi are available here.
This post is an explainer on the telemetry datarates in ArduPilot, plus information and data on how to configure the datarate to fit in lower-bandwidth radio systems.
Typical Datarates
All datarates in this article are averages and are rounded to 1 decimal place. Does not include actions such as downloading parameters or waypoints. All datarates are in the Vehicle → GCS direction.
ArduPilot telemetry is a series of MAVLink messages output from a UART (or serial) port on the flight controller.
The MAVLink messages may be a streamed message (message is emitted at some regular rate), such as the vehicle’s GPS position or hardware status. Other messages are emitted in response to a command or query from the ground station, such as downloading parameters or a confirmation of a flight mode change.
The following table shows the average datarate of the default streamed messages from the different ArduPilot firmwares at the default rate of 4Hz. Note the datarate whilst the vehicle is armed is slightly higher, as additional streamed messages (such as NAV_CONTROLLER_OUTPUT) are active. The datarate will vary depending on the vehicle hardware and configuration, as additional sensors (such as a 2nd GPS) will increase the datarate.
Firmware
Datarate when disarmed
Datarate when armed
Plane
3.5 kbytes/sec
4 kbytes/sec
Copter
3.5 kbytes/sec
3.7 kbytes/sec
Rover
3.4 kbytes/sec
3.9 kbytes/sec
On a typical 57600 baud RF telemetry radio, this equates to 59%-69% of the available radio datarate being used.
Lowering the Datarate
If you are using a lower baud RF link, then ArduPilot’s streaming datarates may need to be trimmed down. There are several methods to do this.
The easiest method is to lower the rate of the streams. By default, a GCS will ask ArduPilot to stream at 4 Hz. This can be changed in Mission Planner in Config→Planner→Telemetry Rates or in MAVProxy via the --streamrate=n commandline option.
So, lowering the streamrates down to 1Hz gives the following average datarates:
Firmware
Datarate when disarmed
Datarate when armed
Plane
0.9 kbytes/sec
1.0 kbytes/sec
Copter
0.9 kbytes/sec
0.9 kbytes/sec
Rover
0.9 kbytes/sec
1.0 kbytes/sec
Taking this further, streams can be disabled. For example, you may not want raw sensor readings or RC channel values. In that case, set the “Sensor” and “RC” streams to “0” in Mission Planner. At this time, MAVProxy does not support setting individual streamrates.
If finer grained control of which MAVLink messages are streamed is desired, the individual messages and rates can be controlled. There are a few methods for doing this.
For this example, a file containing the message ID’s and rate (in milliseconds) is placed in the SD card’s root directory:
message-intervals-chan0.txt
33 200
1 1000
74 2000
The above file tells ArduPilot that chan0 should stream
We are happy to announce the release of Version 0.8.0 of Rpanion-server!
Rpanion-Server is an Open-Source software package for a managing the companion computer (such as the Raspberry Pi and NVIDIA Jetson) connected to an ArduPilot or PX4-based flight controller. It will run on most Linux-based systems.
Rpanion-Server consists of a node.js webserver for the user interface and mavlink-router for routing MAVLink telemetry from the connected flight controller. GStreamer handles low latency video streaming from any connected cameras. There are also modules for managing network connections, NTRIP streaming and viewing hardware information.
Version 0.8.0 adds the following major new features:
Add UDP video streaming
Support for Ubuntu on the Raspberry Pi and NVIDIA Jetson
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.